
Navigation and Localization Techniques
- Typ: Vorlesung (V)
- Lehrstuhl: KIT-Fakultäten - KIT-Fakultät für Elektrotechnik und Informationstechnik
- Semester: SS 2026
-
Ort:
Bld. 30.10, R. 3.40
-
Zeit:
Mittwoch, 14:00 - 17:15 Uhr
14-tätig - Beginn: 22.04.2026
- Dozent:
- SWS: 2
- ECTS: 3
- LVNr.: 2308440
-
Prüfung:
Oral (approx. 20 min)
2 – 3 possible dates will be announced at the end of the lecture period -
Hinweis:
The dates for the lecture are:
Wednesday 22.04.2026,
Wednesday 06.05.2026,
Wednesday 20.05.2026,
Wednesday 17.06.2026,
Wednesday 01.07.2026,
Wednesday 08.07.2026,
Wednesday 22.07.2026
The lecture will be given in English.
Short Description
The course gives an in-depth introduction to modern navigation and localization techniques. The focus is on radio-based navigation, inertial navigation systems (INS), and sensor fusion for aerospace and land-based applications. Examples of radio-based navigation include the Global Navigation Satellite Systems (GNSS) GPS and Galileo as well as terrestrial radio navigation.
In particular the course develops and analyzes different methods to localize mobile terminals, e.g., smartphones, with radio signals. First, radio receivers estimate location dependent parameters such as the time of arrival. Second, based on the extracted parameters, Bayesian filters estimate and track the position of the mobile terminals. Finally, the Bayesian filters fuse the radio signal measurements with INS.
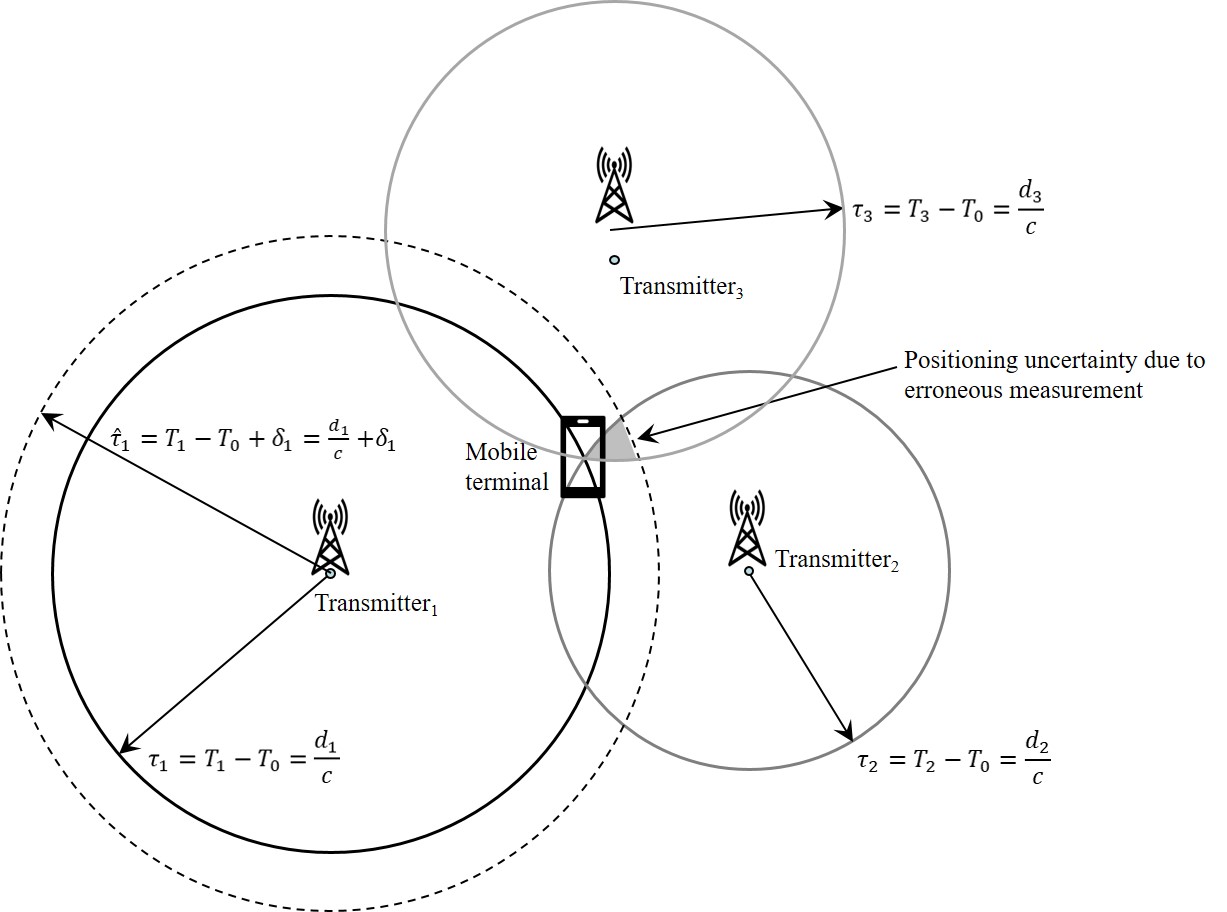
Figure: Two-dimensional radio positioning with time-of-arrival (TOA) measurements: The measurement of the propagation delays τ1, τ2, τ3 determines the distance between Transmitterx and the Mobile terminal. In the case of error free TOA measurements, the three circles intersect in one point, which is the position of the Mobile terminal.
Contents
- Introduction to Navigation
- Navigation and Positioning Principles
- Estimation of Position dependent Parameters
- Position Estimation and Tracking
- GNSS
- Inertial Navigation and Sensor Fusion
- Navigation in Aerospace and on Land
- Advanced Topics, e.g. multipath and non-line-of-sight propagation, cooperative and swarm navigation, or simultaneous localization and mapping for pedestrians
The lecture is mainly based on the following two books:
- Stephan Sand, Armin Dammann, Christian Mensing (2014) Positioning in Wireless Communications Systems. John Wiley & Sons. ISBN 0470770643. (IEEE Xplore, Books, https://ieeexplore.ieee.org/servlet/opac?bknumber=8039577)
- Jari Nurmi, Elena-Simona Lohan, Stephan Sand, Heikki Hurskainen (2014) GALILEO Positioning Technology. Signals and Communication Technology, 182. Springer. ISBN 9789400718296. ISSN 1860-4862. (KIT library online full text available)